Short-Term Uniformity: Balance1
Introduction
The Balance driver produces sequences which favor short-term uniformity. Samples are assembled bit by bit
using statistical feedback.2 The decision of whether a certain bit
should be set to 1 or cleared to 0 is guided by a statistic s.
This statistic keeps track of how often the set state has been used, as opposed to how often the clear state has been used:
-
s = 0indicates that set and clear states have both occured in the same amounts, suggesting that the decision between states should be unbiased. -
s > 0indicates that set has occured more often than clear, suggesting that the clear state should be favored. -
s < 0indicates that clear has occured more often than set, suggesting that the set state should be favored.
Just one of these statistics guides bit 1, which determines whether the sample value will fall between 0.0 and 0.5 (bit 1 clear) or between 0.5 and 1.0 (bit 1 set).
Two statistics guide bit 2. One statistic applies when bit 1 is clear; this determines whether the sample value will fall between 0.00 and 0.25 (bit 1 clear, bit 2 clear) or between 0.25 and 0.50 (bit 1 clear, bit 2 set). The other statistic applies when bit 1 is set; this determines whether the sample value will fall between 0.50 and 0.75 (bit 1 set, bit 2 clear) or between 0.75 and 1.00 (bit 1 set, bit 2 set).
Each increment in bit number causes the number of statistics to double. The number of bits affected is controlled by a depth
parameter. I usually set this to 6, giving 1+2+4+8+16+32 = 63 statistics for the Balance driver
to manage.
Set/clear decisions can be leavened by a heterogeneity parameter, which permits Balance
to sometimes make the 'wrong' decision when s is close to zero.
Each statistic s reflects the physical usage count for one particular bit under a
specific combination of more significant bits. When the heterogeneity is less than one (say 0.1),
randomness only exerts influence when s = 0; that is, when the count of set bits equals
the count of clear bits. When the heterogeneity setting slightly exceeds one (say, 1.1) then
random influence extends to s values -1, 0, and 1. Increasing
heterogeneity settings further increase the opportunity to set the bit when
it 'ought' to be clear or to clear the bit when it 'ought' to be set. However, s will
never range outside ± heterogeneity.
The Balance driver bears a particular relation to
Lehmer, which wrap's Java's standard random number generator.
Output from both these drivers nominally follows a continuous uniform distribution;
however of the two, only Balance realizes this distribution over the short term. In that
sense Lehmer is the continuous counterpart of the urn
model's selection with replacement, just as Balance is one continuous counterpart
of selection without replacement. In this regard, Balance compares to
DriverSequence in
UsageMode.UNIQUE_SHUFFLE.
Use of either Balance or DriverSequence in
place of standard randomness is appropriate when conformity to a distribution trumps
the unpredictability of randomness. A good indicator that the distribution is important is the difference between lightest and heaviest distribution
weights. Consider a circumstance with ten decisions each having two options. If the options are weighted equally then standard randomness will
likely give you five of each, maybe four of one and six of the other, and so forth, with a small but nonzero likelhood of only choosing one
option. However suppose option #1 is weighted 9 times more heavily than option #2. With standard randomness it's very
likely that option #2 will never appear at all. But by specifying a weight for option #2, you were saying that you wanted option #2
there, just not in quantity. Both Balance and DriverSequence
will represent each option fairly. With DriverSequence the presentation won't alternate between
options but rather mix them up in an unpredictable order. Balance, by contrast, will
present the lightly weighted option quasi-periodically over the extent of the selection cycle.
Now suppose that the weights are evolving over time, that things start out favoring option #1 over option #2 but the weights shift linearly until option #2 has the heavier weight. This situation suggests that occurances of option #2 are initially rare, but that option #2's rate of occurrance gradually increases to the point where option #2 predominates. Neither standard randomness nor shuffling will give you those narrowing occurrance intervals; instead these two approaches will jumble things up. Only balanced-bit selection will pace occurrances according to what rates the weights imply.
The Balance indexer is the continuous counterpart to the
Feedback indexer, to the extent that both rely upon
statistical feedback. The difference is that Balance produces
continuous uniform distributions which must be
adapted to non-uniform distributions using an external Transform.
Feedback, by contrast, accepts a discrete distribution parametrically.
Profile
Figure 1 illustrates Balance output with sequences of
200 samples generated with depth 6 and various heterogeneity settings.
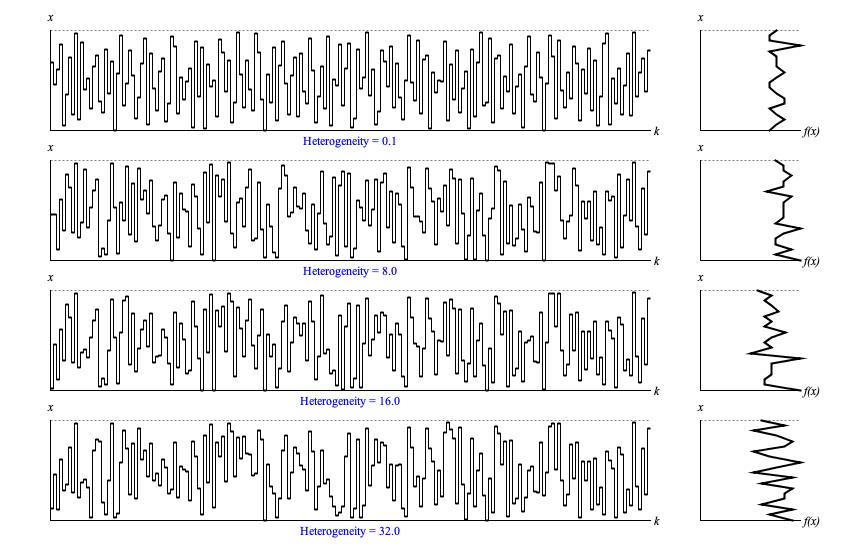
Figure 1: Sample output from
Balance.next(). The left
graph displays samples in time-series while the right graph presents a histogram analyzed from the same samples.
The vertical x axes for both graphs represent the driver domain from zero to unity; the horizontal k axis of the time-series graph (left) plots ordinal sequence numbers; the horizontal f(x) axis of the histogram (right) plots the relative concentration of samples at each point in the driver domain. The main takeaway from Figure 1 is that sample values are spread uniformly from zero to unity.
The topmost sequence in Figure 1 uses a heterogeneity setting
of 0.1, which engages randomness only when set and clear are equally balanced. There's jaggedness in the histogram, yes, but
with an average of 10 samples per histogram region the jags represent differences of mostly 1-2 samples (10-20%).
I reran these graphs several times, and it took a heterogeneity setting
of 8 to make the second graph appreciably different from the first. Even here the difference is subtle. The topmost
sequence alternates rapidly between low (0.0 to 0.5) and high (0.5 to 1.0) sample values. However if you look about 1/3 of the
way through the second graph, you'll discover a subsequence of nine samples all lingering in the upper half of the driver domain.
Thus increasing the heterogeneity setting has the effect of stretching things out
so that rather than striving for uniformity over the short term, Balance
strives for uniformity over the medium term.
Bitwise Analysis
Figure 2 takes the sequence shown in Figure 1 and breaks out what happens in bit 1 (zero or one-half), bit 2 (zero or one-quarter), bit 3 (zero or one-eighth), bit 4 (zero or one-sixteenth), and the residual bits (continuous between zero and one-sixteenth).
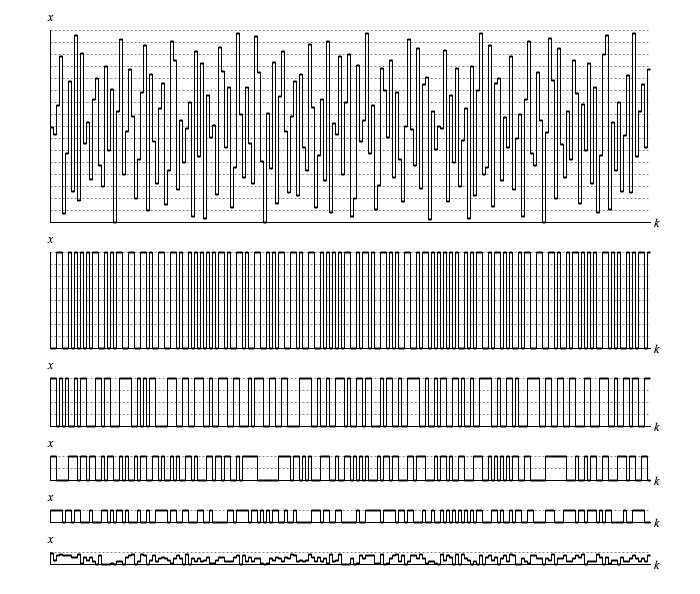
Figure 2: Bitwise analysis of a sequence generated by
Balance.next().
The bit-specific graphs in Figure 2 transition back and forth between a set state (bit value 1) and a clear state (bit value 0). Table 1 statistically analyses the actual transition stats for these bit-specific graphs. Pay the closest attention to bit 1 (top row), which has just one statistic guiding its decisions. Here the number of samples between transitions is either 1 or 2, never more. That makes sense considering that for the first sample it's a coin toss, for the second sample it's the one not chosen for the first, for the third sample it's again a coin toss, for the fourth sample it's the one not chosen for the third. The other bits are more complicated. You can see for bit 2 there's never more than 4 samples between a transition; presumably for bit 3 there's never more than 8 samples between a transition.
| Transitions | 1 Sample | 2 Samples | 3 Samples | 4 Samples | 5 or more | |
|---|---|---|---|---|---|---|
| Actual Bit 1 | 149 | 65% | 34% | 0% | 0% | 0% |
| Actual Bit 2 | 103 | 32% | 48% | 12% | 6% | 0% |
| Actual Bit 3 | 110 | 48% | 34% | 11% | 1% | 3% |
| Actual Bit 4 | 106 | 47% | 32% | 9% | 7% | 3% |
Figure 3: Histogram of sample-to-sample differences from
Balance.next() after 10,000 consecutive samples.
Transitions
Figure 3 plots the range of sample-to-sample differences along the vertical Δx
axis against the relative concentrations of these values along the horizontal f(Δx) axis.
Here's the reality: The Balance driver likes to jump around.
The peak around zero that appears for the other probabilistic drivers —
Lehmer,
Borel,
Moderae,
Brownian, and
Rosy, and
Voss — is replaced in this graph by a
pronounced void.
The standard deviation of Δx around zero is 0.482, which well exceeds the 0.410 deviation found for the
Lehmer driver — an indication of proximity aversion.
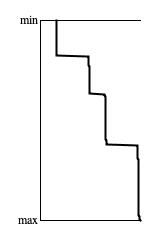
Figure 4: Divergence of 4-nibble pattern counts from
Balance.next() with 10,000 samples per pattern.
Independence
Figure 4 presents a trend graph of histogram tallies for 4-nibble patterns generated using
Balance.next(). My analysis program decided to exclude low-frequency
patterns by limiting the graph to the 16,200 largest tallies, and since it took a long time to run I chose not to rerun with this feature disabled. The most frequent patterns were:
| 7 | 0 | 13 | 4 |
| 3 | 0 | 12 | 8 |
| 10 | 14 | 4 | 9 |
| 1 | 10 | 3 | 4 |
All of which had comparable tallies representing less than 1% presence. The distinguishing feature of these patterns is that they all contain large leaps. I don't believe there is anything special distinguishing these four patterns from any of the others that contributed to the bottom-most stair step in Figure 4.
The conclusion from Figure 4 is that the Balance driver
fails the 4-nibble independence test.
Balance implementation class.
Coding
The type hierarchy for Balance is:
-
DriverBase extends WriteableEntityimplements Driver -
Balance extends DriverBase
Listing 1 provides the source code for the Balance
class. The sequential process described at the top of this page is implemented by
generate(), which is not public facing. Instead,
generate() is
called by DriverBase.next().
DriverBase.next() also
takes care to store the new sample in the field
DriverBase.value, where
generate() can employ
DriverBase.getValue() to pick this
(now previous) sample up for the next sample iteration.
DriverBase also offers
setValue() and randomizeValue()
methods to establish the initial sequence value.
Comments
- The present text is adapted from my Leonardo Music Journal article from 1992, "A Catalog of Sequence Generators". The heading is "Balanced Bits", p. 61.
- Statistical feedback is explained in my Perspectives of New Music article from 1990, "Statistics and Compositional Balance".
| © Charles Ames | Page created: 2022-08-29 | Last updated: 2022-08-30 |