Calculation Methods for Tempo Contours
This page reconstructs a bit of essential work first described at the 1978 ICMC by John Rogers and John Rockstroh. The paper was entitled “Score-Time and Real-Time”. The achievement has not been celebrated widely in the computer music community, but then again the same community never lent much glamor to the larger subject of score preprocessing.
The central point made by Rogers and Rockstroh was that tempo changes feel most uniform when the tempo graph for an accelleration or a ritard proceeds along an exponential or equal-ratios curve. This should not be surprising, since we hear rhythms proportionally. A sequence of unequal rhythmic durations remains recognizable if every duration in the sequence is doubled; likewise if every duration is halved. However the result produced by extending each duration an extra eighth note is heard as a distortion of the original.
By “score-time” Rogers and Rockstroh meant what this site calls relative time; that is, time measured in whole notes. By “real-time” they meant absolute time in seconds (rather than hear-as-you-calculate). Thus to make the tempo of a sequence of quarter notes accelerate uniformly over its timespan, the ratios between consecutive absolute-time durations should be the same and, particularly, the ratio between the opening pair of absolute-time durations should match the ratio between the closing pair of durations.
While the principle of equal ratios is itself straightforward, the math needed to convert from relative time to absolute time is challenging because the tempo potentially changes while the duration proceeds. We address this challenge by considering four scenarios. All four instances start with a duration Δr ranging along the relative-time axis from r0 to r1, and all four end with an absolute-time duration Δt. The scenarios are:
- In scenario #1 the tempo contour contains a single constant segment. This allows us to derive the basic conversion formula.
- In scenario #2 Δr stretches across multiple segments. The procedure for combining segments together comes down to adding up contribution from each segment.
- In scenario #3 a single segment of uniformly accelerating tempo contains all of Δr. The absolute duration Δr is obtained by calculating the area under the curve 1/T(r) from r0 to r1.
- In scenario #4 a single segment of uniformly ritarding tempo contains all of Δr. The area under the 1/T(r) is again calculated, but this time T(r) reverses what appeared in scenario #3.
The
Scenario #1: Constant Tempo
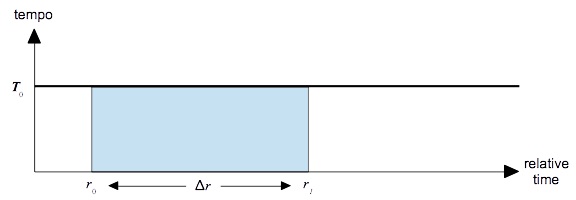
Suppose first that tempo is constant. Figure 1 graphs this scenario. The horizontal axis plots relative time in whole notes, while the vertical axis plots tempo in quarter-note beats per second. The thick horizontal line plots the tempo contour T(r), which holds constant at T0 over a single segment ranging from 0 to ∞.
Tempo gives the proportion of beats (relative time) to seconds (absolute time). We already know the number of beats is Δr, and what we want to know is the number of seconds Δt. That is we need to multiply Δr by the proportion of seconds to beats, which is the reciprocal of the tempo. Thus in a fixed-tempo scenario we can calculate:
| Δt | = | Δr T(r) |
= | Δr T0 |
(Expression 1) |
Scenario #2: Multiple Segments
In general a a relative-time duration Δr ranging from r0 to r1 may be converted into an the absolute-time duration Δt by calculating the area under the 1/T(r) curve from r0 to r0. This operation can be represented mathematically using the formula:
| Δt | = | ∫r1r0 | dr T(r) |
(Expression 2) |
Where the ∫ sign means ‘sum together’ and the term dr indicates very small intervals along the horizontal axis.
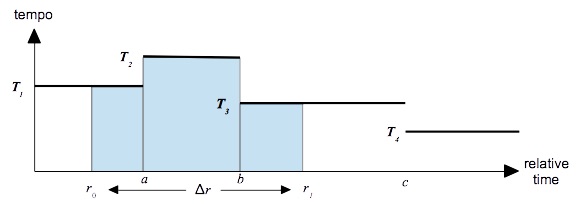
Now we consider the the scenario depicted in Figure 2, where the tempo contour divides into four segments:
- from relative time 0 to relative time a with constant tempo T1,
- from relative time a to relative time b with constant tempo T2,
- from relative time b to relative time c with constant tempo T3, and
- from relative time c to relative time ∞ with constant tempo T4.
Wherever T(r) is constant, 1/T(r) is constant also. It is a fact about the ∫ operation that summing a constant over an interval scales the constant by the interval:
| ∫x3x1 | Cdx | = | C | ∫x2x1 | dx | + | C | ∫x3x2 | dx | = | C[x2 − x1] | − | C[x3 − x2] | = | C[x3 − x1] |
applying this fact to Figure 2,
| ∫ar0 | dr T(r) |
= | a − r0 T1 |
∫ba | dr T(r) |
= | b − a T2 |
∫r1b | dr T(r) |
= | r1 − b T3 |
which combine to produce:
| Δt | = | ∫ar0 | dr T(r) |
+ | ∫ba | dr T(r) |
+ | ∫r1b | dr T(r) |
= | a − r0 T1 |
+ | b − a T2 |
+ | r1 − b T3 |
(Expression 3) |
Scenario #3: Tempo Accelerates Within a Segment
If the tempo accelerates within a segment the acceleration is felt to be most uniform if it proceeds in "equal ratios". For example, suppose we have a sequence of twelve quarter notes and we want the music to accellerate uniformly from ♩=60 (1 quarter per second) to ♩=120 (two quarters per second). The following sequence of absolute durations will accomplish this:
| Relative Time: | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Absolute Duration: | 0.97 | 0.92 | 0.87 | 0.82 | 0.77 | 0.73 | 0.69 | 0.65 | 0.61 | 0.58 | 0.55 | 0.51 |
Notice three facts:
- The initial duration is just below unity, giving a rate of one absolute whole note per second.
- The final duration is just above one-half, giving a rate of two absolute whole notes per second.
- Each duration in this series has 94% the length of its predecessor.
The "equal ratios" behavior is characteristic of an exponential contour as described above. However you can't just divide the relative duration by the tempo of the moment because the tempo continues to change as the duration proceeds.
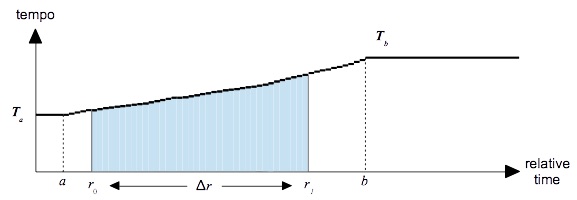
The scenario shown in Figure 3 assumes a single segment starting at time a ≤ r0 with origin tempo Ta and starting at time b ≥ r0 with goal tempo Tb. The goal tempo Tb is faster than the origin tempo Ta. According to the general page on contour calculations, the interpolation formula for such a segment is:
where the interpolation factor x(r) is calculated as:
| x(r) | = | r − a b − a |
(Expression 5) |
With this interpolation formula, the area under the 1/T(r) curve (Expression 2) evaluates as shown in Expression 6.
| Δt = | b − a Ta ∙ ln(Ta/Tb) |
∙ | [eln(Ta/Tb)x(r1) − eln(Ta/Tb)x(r0)] | (Expression 6) |
This complicated expression, along with Expression 8 for ritards, fortunately need be implemented only once, deep in the conversion infrastructure. A mathematical derivation of Expression 6 is provided below.
Scenario #4: Tempo Ritards Within a Segment
This scenario resembles the one shown in Figure 3 except that the goal tempo Tb is slower than the origin tempo Ta. According to the general page on contour calculations, the interpolation formula becomes:
| T(r) | = | Tb ∙ (Ta/Tb)(1-x(r)) | (Expression 7) |
With this alternative interpolation formula, the area under the 1/T(r) curve evaluates as as shown in Expression 8.
| Δt = | b − a Tb ∙ ln(Tb/Ta) |
∙ | [eln(Tb/Ta)(1-x(r1)) − eln(Tb/Ta)(1-x(r0))] | (Expression 8) |
Mathematical Derivation
When the tempo increases by equal ratios, then the absolute duration may be calculated by integrating the reciprocal of the tempo from the relative starting time r0 to the relative ending time r1.
| Δt = | ∫r1r0 | dr T(r) |
(Expression 2 reprised) |
Substituting T(r) from Expression 4 into Expression 2:
| Δt = | ∫r1r0 | 1 Ta |
∙ (Ta/Tb)x(r)dr |
or
| Δt = | 1 Ta |
∫r1r0 | eln(Ta/Tb)x(r)dr | (Expression 9) |
Let
| u = | ln(Ta/Tb)x(r) | = ln(Ta/Tb) ∙ | r − a b − a |
(Expression 10) |
then
| du dr |
= | ln(Ta/Tb) b − a |
solving for dr,
| dr = | b − a ln(Ta/Tb) |
∙ du | (Expression 11) |
Substituting u from Expression 10 and dr from Expression 11 into Expression 9,
| Δt = | b − a Ta ∙ ln(Ta/Tb) |
∙ | ∫u1u0 | eudu |
evaluating the definite integral,
| Δt = | b − a Ta ∙ ln(Ta/Tb) |
∙ | [eu1 − eu0] |
or
| Δt = | b − a Ta ∙ ln(Ta/Tb) |
∙ | [eln(Ta/Tb)x(r1) − eln(Ta/Tb)x(r0)] | (Expression 6 reprised) |
| © Charles Ames | Page created: 2012-12-01 | Last updated: 2015-08-25 |